
【SAL系列】 空间六自由度柔性适配器用途、使用方法及应用场景
2024-06-07 16:07 BosFun
空间六自由度柔性适配器尤其适用于六轴机器人抓取或植入对象的空间位置度及空间角度姿态存在误差的场合。SAL系列柔性适配器尤其擅长于汽车电子连接器精密植入嵌件注塑生产中自动补偿或修正六轴机器人抓取、搬运、植入嵌件注塑模具产线(修)架模后工作对象的空间位置误差、角度误差、姿态误差、重复定位误差,大幅缩减机器人精确位置和姿态示教时间95%以上。
【使用方法】:
a.将本柔性适配器安装于自动搬运机构或六轴机器人腕部,其下方安装产品取放用夹具;
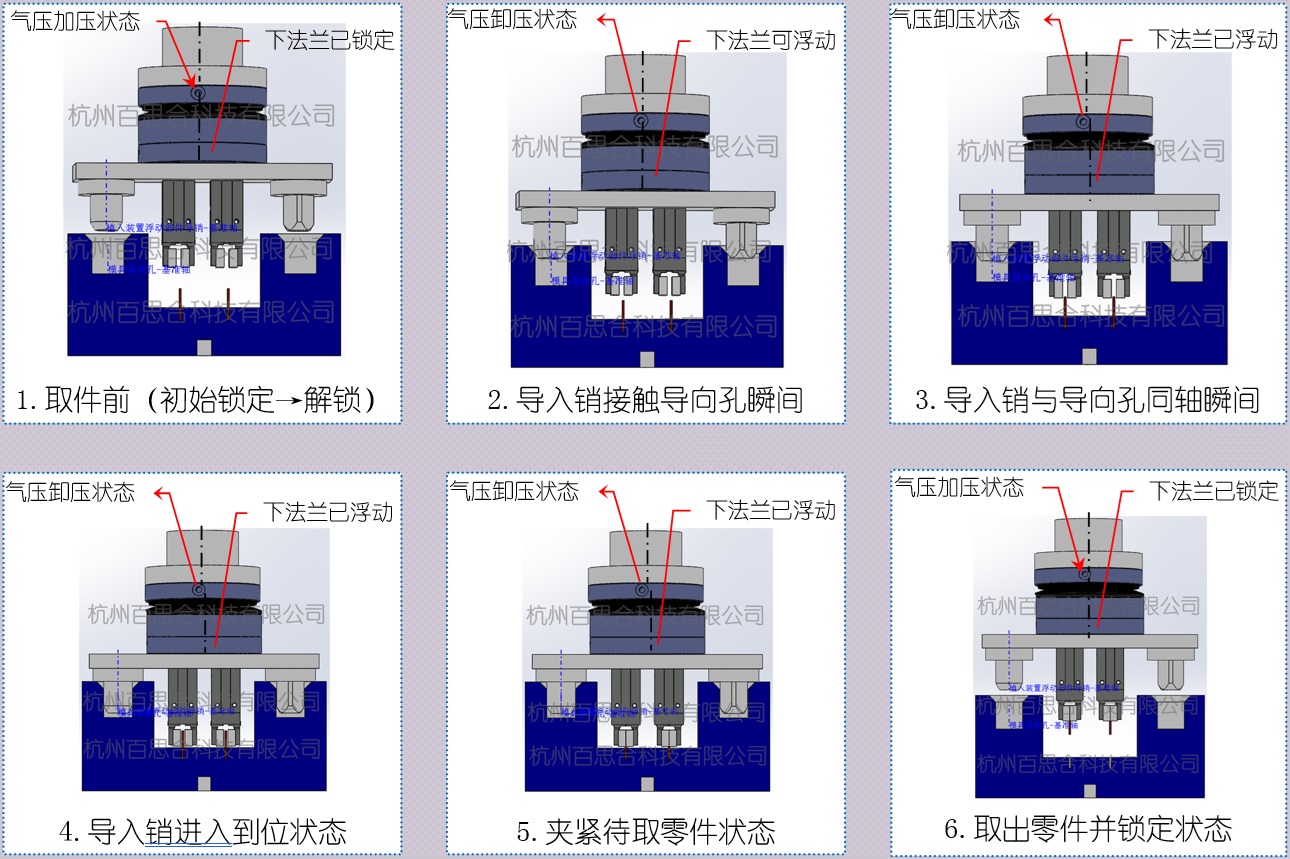
b.自动搬运机构或六轴机器人趋近目标区域,卸除气压,解锁适配器,以柔性适配抓取目标零件;
c.自动搬运机构或六轴机器人将零件取出脱离其定位治具,然后,气压再次驱动锁定柔性适配器;
d.自动搬运机构或六轴机器人运动至放置(待植入)零件(嵌件)的目标区域(模具内);
e.卸除气压,解锁适配器,柔性拟合零件(嵌件)与目标(模具)之间的空间位置和姿态偏差,自动搬运机构或六轴机器人顺利将零件(嵌件)放置(植入)到目标(模具)内;
f.自动搬运机构或六轴机器人脱离目标(模具)后,气压驱动锁定本柔性适配器;
g.自动搬运机构或六轴机器人运动至下一次循环工作起点位置;
h.循环重复上述b~g步骤动作。
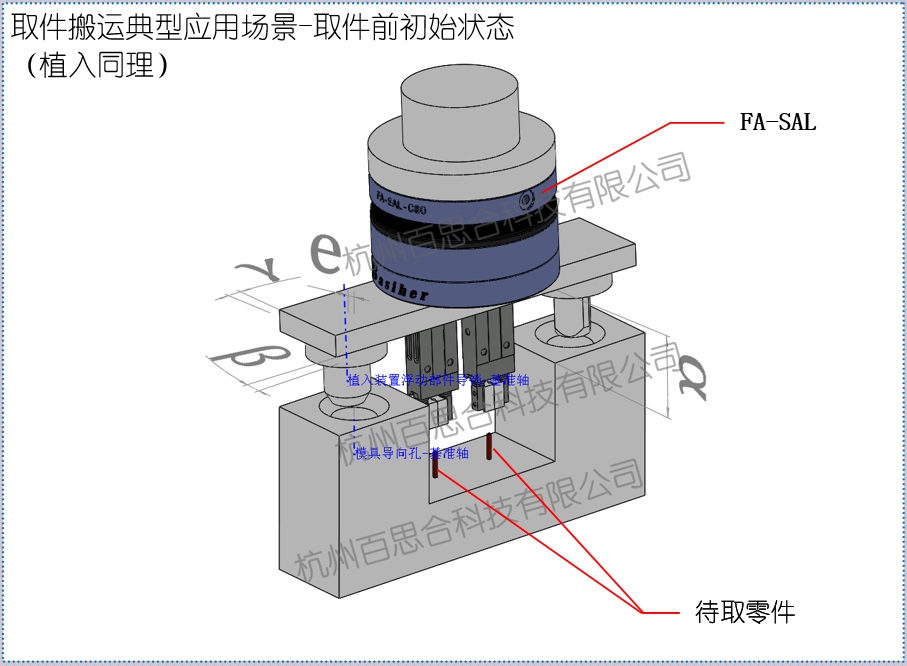
搬运取件应用场景图:
声明:此篇为百思合的网站原创文章,转载请标明出处链接: http://basiher.com/h-nd-10.html